Conoscenza del settore | Piccoli dettagli sull'utilizzo del sensore LiDAR in scenari speciali
- Condividi
- Data Emissione
- 2024/5/29
sommario
I prodotti con sensori LiDAR includono il tipo di evitamento degli ostacoli, il tipo di navigazione e il tipo di navigazione integrata ed evitamento degli ostacoli; presentano i vantaggi di elevata precisione di misurazione, velocità di scansione elevata, forte capacità anti-interferenza, dimensioni ridotte, leggerezza e alta affidabilità.
Il sensore LiDAR è una tecnologia proposta per la prima volta negli anni '60. Con la sua ampia applicazione, negli ultimi anni LiDAR ha vissuto una nuova fase di prosperità, progresso e utilizzo multisettoriale. È diventata rapidamente una tecnologia chiave nei settori della guida autonoma, delle ispezioni con droni, dell’automazione industriale, ecc.
Ad oggi, DADISICK ha lanciato diversi prodotti della serie di sensori LiDAR , che coprono il tipo di evitamento degli ostacoli, il tipo di navigazione e il tipo di navigazione integrata ed evitamento degli ostacoli; presentano i vantaggi di elevata precisione di misurazione, velocità di scansione elevata, forte capacità anti-interferenza, dimensioni ridotte, leggerezza ed elevata affidabilità e sono la scelta ideale per AGV industriali, robot mobili e robot a bassa velocità.
Ogni sensore ha il proprio scenario applicativo adatto in base alle proprie caratteristiche prestazionali. Nelle applicazioni reali in ambienti speciali, LiDAR ha anche alcuni suggerimenti per l'uso.
Principio di funzionamento del sensore LiDAR
Il sensore LiDAR si basa sul principio del tempo di volo (TOF); LiDAR emette un impulso laser e misura il tempo necessario affinché l'impulso ritorni dopo essere stato riflesso dalla superficie del bersaglio da misurare, che viene poi convertito in dati di distanza.
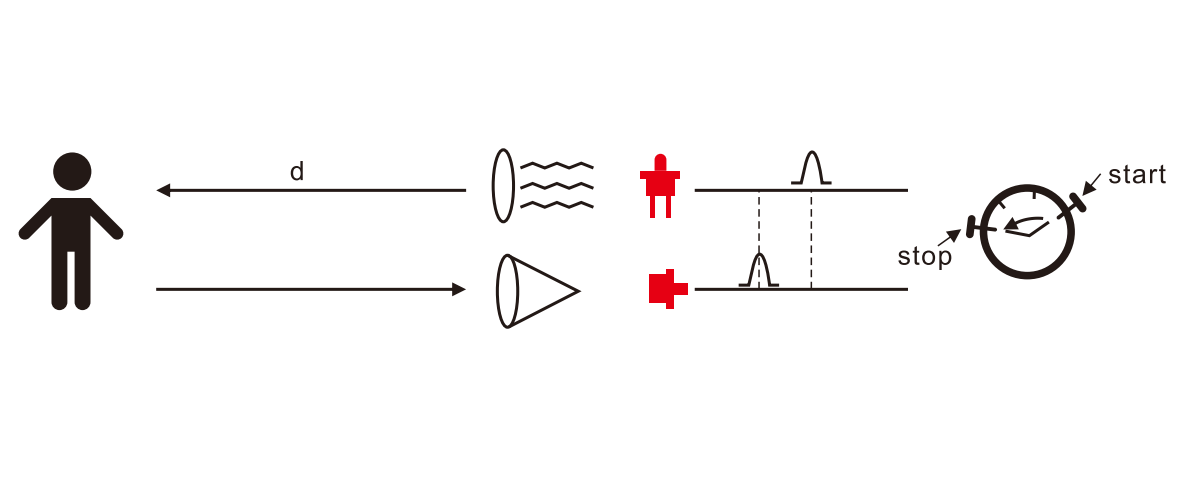
La differenza di tempo tra l'emissione della luce e la ricezione della luce è t
c è la velocità della luce, quindi lo è la distanza tra il radar e il bersaglio
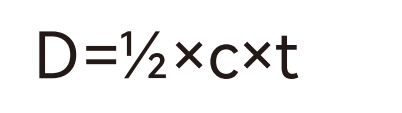
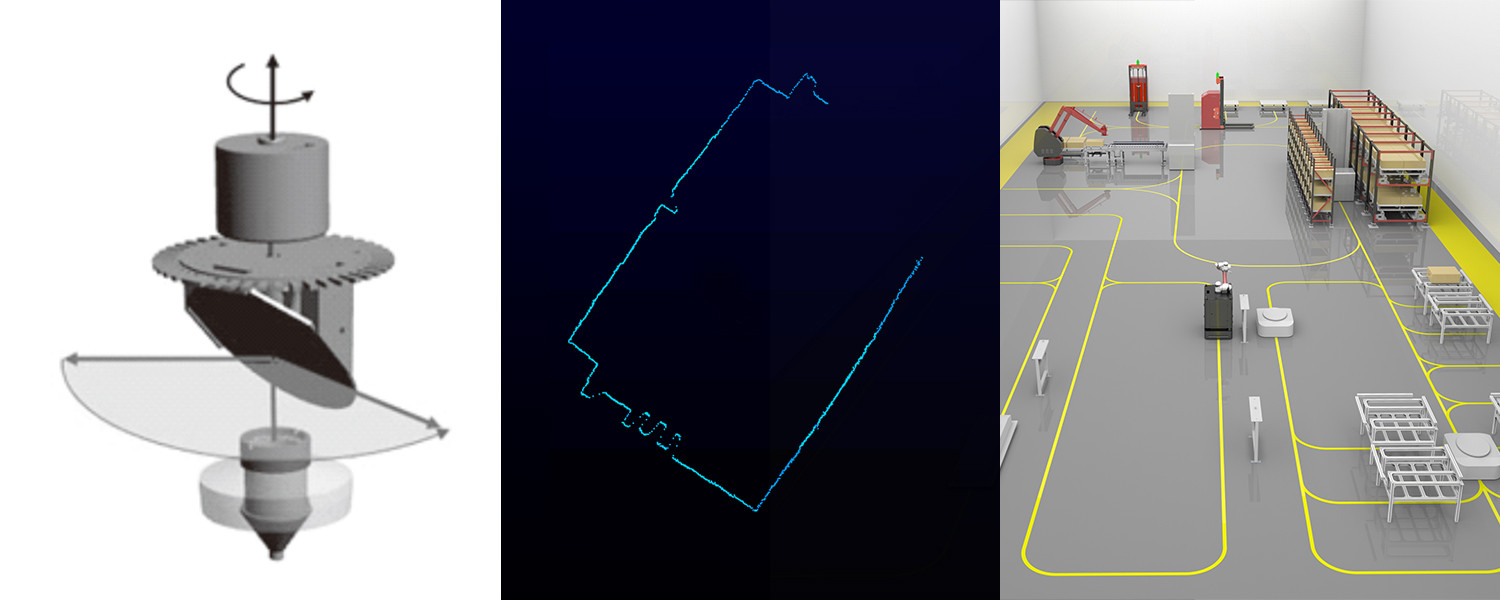
Il sensore LiDAR riflette l'impulso laser di distanza attraverso un riflettore. Quando il riflettore viene azionato dal motore per ruotare, si forma un piano di scansione perpendicolare all'asse di rotazione. Il radar emette luce pulsata a un tempo fisso e il motore fa ruotare lo specchio trasmittente, in modo che possano essere formati dati bidimensionali della nuvola di punti.
Quando c'è un mezzo trasparente nell'ambiente circostante
Difficoltà :
Quando è presente un mezzo trasparente (come acqua pulita) nell'ambiente circostante, è possibile misurare il bersaglio all'interno o dietro il mezzo trasparente. Poiché la luce si rifrange nel mezzo trasparente, il target misurato si trova effettivamente sul percorso luminoso rifratto, mentre il risultato della misurazione si trova sul percorso luminoso rettilineo e la posizione del target misurato devierà. Inoltre il radar può ricevere anche due echi riflessi, uno dalla riflessione della superficie effettiva del bersaglio all'interno o dietro il mezzo trasparente, e l'altro dalla riflessione diffusa della superficie del mezzo trasparente che non è completamente pulita. In questo momento, il risultato della misurazione è incerto e potrebbe riguardare la superficie media o l'obiettivo effettivo.
Contromisure:
Nell'uso reale, i mezzi trasparenti nell'ambiente, soprattutto quelli con superfici a specchio, necessitano di un trattamento speciale per evitare risultati di misurazione instabili o errati. Il metodo di trattamento specifico può consistere nel rendere la superficie del mezzo diffusamente semitrasparente, ridurre la trasparenza e la capacità di riflessione o schermare queste posizioni durante l'elaborazione dei dati di misurazione.
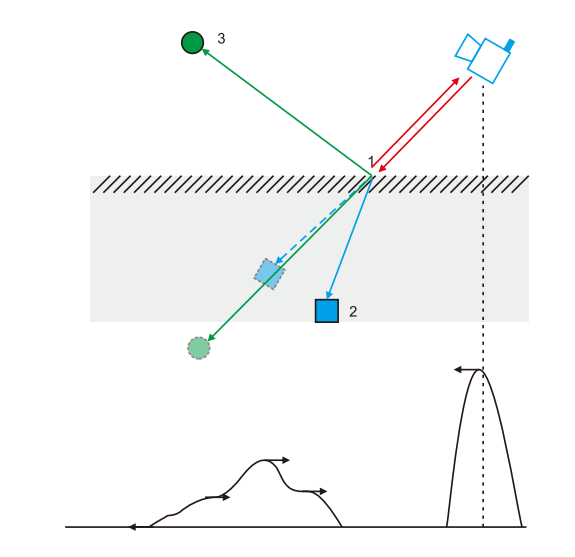
Quando si misurano target a specchio

Quando il radar misura bersagli specchiati, prestare attenzione! ! Una misurazione efficace può essere ottenuta solo quando la superficie target è perpendicolare al laser incidente. Se l'angolo di incidenza del laser non è perpendicolare, la sua riflettività diffusa è molto bassa, con conseguente misurazione inefficace. Il risultato misurato effettivo è la distanza del target dello specchio sul percorso luminoso di riflessione dello specchio, come mostrato nella figura:
La proiezione radar sul target dello specchio produce una riflessione totale e la luce a riflessione totale viene proiettata sul target. La distanza effettiva testata dal radar è la distanza del bersaglio con cornice tratteggiata.
Informazioni sulla portata effettiva del sensore LiDAR
La portata effettiva del radar per un bersaglio specifico sarà influenzata dai seguenti fattori:
1. Riflettività diffusa target:
La riflettività diffusa target non è legata solo al materiale, ma anche all'orientamento della superficie. Maggiore è la riflettività diffusa target, maggiore è la portata effettiva.
2. Area di riflessione:
L'area della superficie target coperta dal punto laser. Maggiore è l'area di copertura, maggiore è la distanza di misurazione effettiva.
3. Sporcizia della copertura di trasmissione della luce:
La copertura sporca del radar per la trasmissione della luce causerà una diminuzione della trasmissione della luce. Quanto più diminuisce la trasmissione della luce, tanto peggiore è la capacità di misurazione. Quando la trasmissione della luce scende al 60%, la capacità di misurazione potrebbe essere completamente inefficace.
4. Condizioni atmosferiche:
L'effettiva capacità di misurazione del radar è influenzata anche dalle condizioni atmosferiche, soprattutto quando si lavora all'aperto. Quanto peggiore è la capacità di propagazione della luce dell'atmosfera, tanto minore è la capacità di misurazione effettiva del radar. In condizioni atmosferiche estreme (come la nebbia fitta), la capacità di misurazione sarà completamente inefficace.
Prodotti di vendita caldi
Distanza di 5 metri, una tecnica che utilizza un raggio laser per misurare la distanza e creare mappe dettagliate di oggetti e ambienti.

Distanza di 20 metri, una tecnica che utilizza un raggio laser per misurare la distanza e creare mappe dettagliate di oggetti e ambienti.

Portata di rilevamento 20 m. Una tecnica che utilizza un raggio laser per misurare la distanza e creare mappe dettagliate di oggetti e ambienti.

Convertendo dal laser in segnali elettrici. determinare varie caratteristiche, distanza, spostamento o posizione.